本文目录导读:
惯性导航是一种基于惯性原理的导航技术,它利用物体的惯性来提供位置和方向信息,而IMU(惯性测量单元)则是惯性导航系统中不可或缺的一部分,它能够实时测量和跟踪物体的加速度、角速度和姿态等信息。
惯性导航技术概述
惯性导航技术是一种基于惯性原理的导航方法,它通过测量和跟踪物体的惯性数据,实现高精度、高可靠性的导航,惯性导航系统通常由惯性测量单元、数据处理单元和控制系统等部分组成,IMU是惯性导航系统中最为核心的部分,它能够实时测量和跟踪物体的加速度、角速度和姿态等信息,为导航系统提供精确的位置和方向信息。
IMU的工作原理
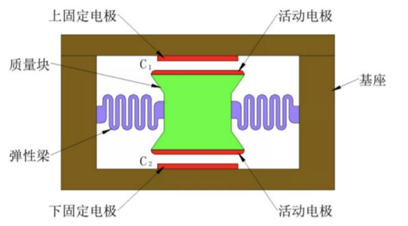
IMU主要由敏感元件、信号处理单元和电源等部分组成,敏感元件能够感知物体的加速度、角速度和姿态等信息,并将其转化为电信号输出,信号处理单元能够对电信号进行滤波、放大、解调等处理,提取出有用的信息,电源为IMU提供稳定的电源供应,保证其正常工作。
在惯性导航系统中,IMU的工作原理是基于牛顿第二定律,当物体在运动过程中,其加速度、角速度和姿态等信息会发生变化,这些变化会被IMU实时测量并记录下来,通过数据处理单元的处理,可以提取出物体的运动状态信息,如位置、速度、加速度等。
IMU的应用
IMU在各种领域都有广泛的应用,例如航空、航天、航海、汽车导航等,在航空领域,IMU可以用于飞机自动驾驶、高度控制等任务;在航天领域,IMU可以用于卫星定位、月球探测等任务;在航海领域,IMU可以用于船舶导航、海洋探测等任务,IMU还可以应用于其他需要高精度位置和方向信息的领域。
IMU是惯性导航系统中不可或缺的一部分,它能够实时测量和跟踪物体的加速度、角速度和姿态等信息,为导航系统提供精确的位置和方向信息,随着技术的不断发展,IMU将会在更多领域得到应用,为人们的生活带来更多的便利和效益。